|
|
| << Back To Focus On | ||
NOVEL, HIGH-EFFICIENCY ACTUATION CONCEPT AND UNDERWATER LOCOMOTION |
||
|
Bioinspired underwater locomotion: smoothly cutting through water The underwater environment allows for a plethora of animal species to adaptively and efficiently move by exploiting a rather unique interaction. Indeed, quite simple control laws can originate a rich behavioral repertoire thanks to the three-dimensional structure/morphology-environment interaction. Locomotion efficiency can be preliminarily addressed via bioinspiration, e.g. by considering fish-like swimming. Fishes smoothly interact with the surrounding fluid-dynamical field and exploit its vortex dynamics to foster locomotion. No propellers are introduced, usually involving energy dissipation by drag losses and complex fluid phenomena (e.g. cavitation). Amongst the swimming modes encountered in nature, undulatory swimming represents a good compromise between cruising and maneuvering (e.g. backward motion and turning) performances. This swimming mode is adopted, for instance, by lampreys and eels. Relatively low swimming speeds are typically involved (others swimming modes, like carangiform and sub-carangiform, are more suitable for achieving high burst and/or sustained speeds), which however permit to contain skin friction effects, thus contributing to propulsion efficiency. |
||
|
||
|
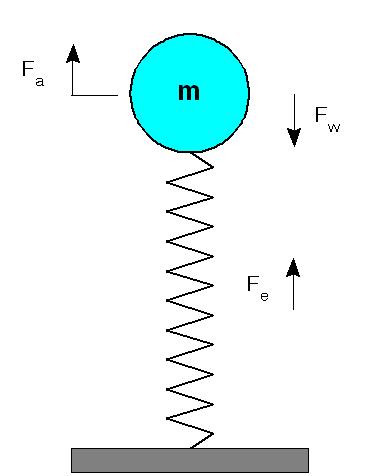
Energy saving by optimal use/control of inertia: how to increase efficiency through passive dynamics Energy efficiency is further pursued by a careful mechanical design, focusing on the main structural features (e.g. mass placement) as well as on the structure-environment interface, suitably conceived for also incorporating a control/actuation strategy as close as possible to the one adopted by the targeted living system (i.e. the lamprey/salamander in our case). More in detail, the structure-environment interface must allow for an effective coupling between the artefact and the surrounding medium. Furthermore, passive dynamics is exploited for improving locomotion efficiency. The main idea underlying this point is to make use of system morphology and compliance so as to store some energy (otherwise dissipated within conventional actuation systems or through the environment) which can be effectively retrieved for powering a subsequent task, e.g. further locomotion steps. In order to better understand this concept, a simple one-dimensional model can be used. In the figure below, the mass m is forced to move according to a simple harmonic time-law with frequency f and amplitude A: x(t) = A · sin(2πf · t) |
||
|
||
|
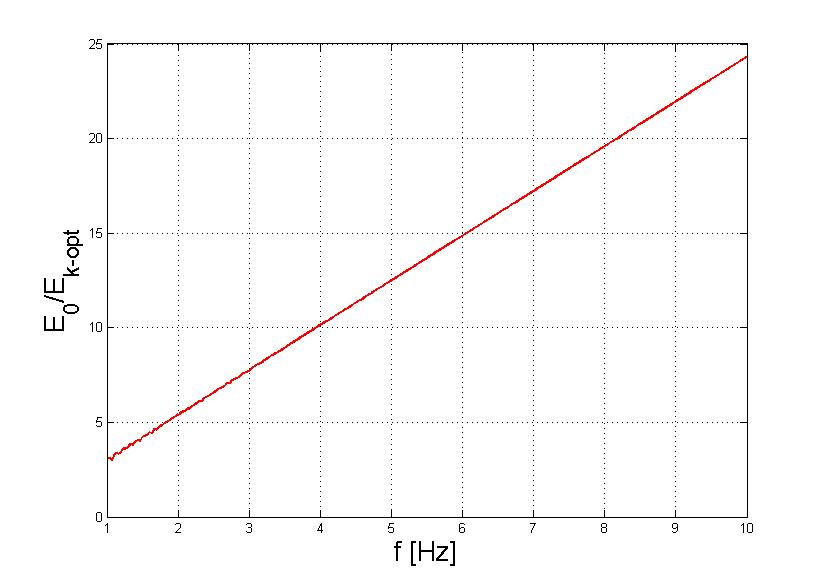
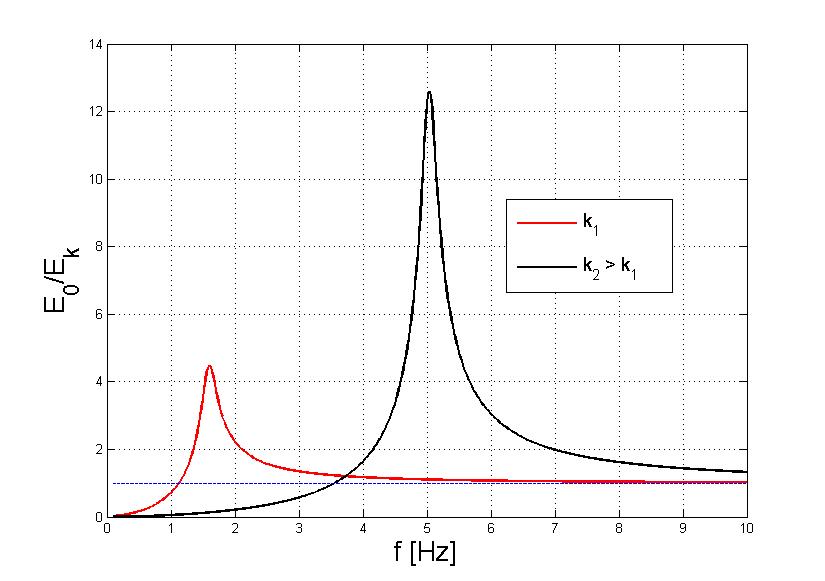
In the figure, Fa represents the active force driving the chosen motion, Fw represents the interaction with the fluid environment (typically accounting for inertial and viscous effects), while Fe is an elastic term accounting for system compliance. Of course, the (positive/negative) direction of the forces varies during the motion; the shown instance is just an example. The driving energy consumption can be computed for both the elastic case (k>0) associated with the passive dynamics concept and the inelastic one (k=0). The comparison reported in the following figures (defined by using suitable values of the parameters) shows that it is possible to save a considerable amount of energy by exploiting the system compliance. In particular, in the left figure an optimal stiffness is introduced for each frequency (i.e. the one minimizing the energy expenditure at that frequency), while in the right one the system stiffness is fixed. The latter case is most frequently encountered in common applications, yet a technology is introduced below (when discussing actuation) which permits to also adjust the system stiffness so as to adapt to a change in the motion frequency, thus broadening the range where passive dynamics can be fruitfully used in order to increase energy efficiency. |
||
|
||
|
Regarding control, use of passive dynamics permits to reduce the number of actuators thus simplifying low-level control, yet making it very challenging to obtain an accurate high-level control. Bioinspiration, again, is invoked for devising an optimal control strategy for adaptive motion: a head-to-tail actuation travelling wave is introduced, like the one modulated in the nervous system of the real animal (lamprey/salamander) by the central pattern generators (CPGs), also based on proprioceptive sensory feedback.
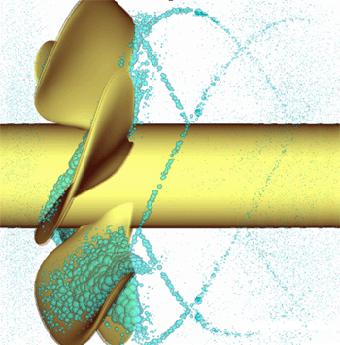
The natural frequency concept, which is usually introduced when discussing harmonic motion, can be extended to travelling waves of the aforementioned type. The following movie, for instance, shows that there exists a frequency which maximizes the swimming speed of a given artefact (having, in particular, a given compliance). Decreasing or increasing the frequency of the actuation travelling wave leads to an inefficient use of the provided energy (either the dynamics of the artefact is poorly evoked or most of the energy is dissipated through the medium). |
||
|
Schematic of a swimming artefact (head marked by different colors), actuated through travelling waves with frequency f [Hz]. |
||
|
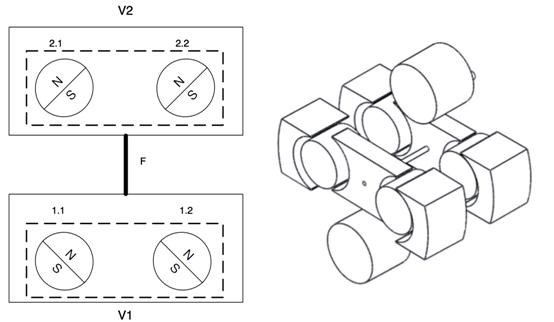
The key enabling technology: novel, compliant, high-efficiency actuation A fully bioinspired, muscle-like, actuation system needs to be incorporated into a compliant system in order to efficiently exploit its passive dynamics. More in detail, for the system motion to be energy-efficient, the actuation must: - be force-controlled; - be back-drivable; - allow for stiffness adjustment (in agonist-antagonist configuration). Moreover, for wireless application, the efficiency of the actuation system plays a major role in view of the powering issue. Commercial actuators are commonly used in bioinspired robotics/engineering applications, due to their cheapness and ease of usage. Amongst them, direct actuators permits to obtain force-control and high back-drivability yet they have poor efficiency, gear-reduction actuators exhibit higher efficiency yet they lack of back-drivability, while fluidic actuators are mainly penalized by the need for a fluidic subsystem which negatively affects the system structure (size, weight and complexity) and efficiency. A novel concept of adaptive, bioinspired, actuation system has therefore been devised and patented by Scuola Superiore Sant'Anna - CRIM Lab (National Patent ID: FI2008A000150; International Patent ID: PCT/IB2009/053376). It is based on permanent magnets with strong residual induction which are thus capable of producing high forces: by changing the magnet orientation, a force is obtained as output, best suited for adaptive motion. Moreover, back-drivability is further enhanced by the direct magnet-magnet interaction and friction is minimized by minimizing the presence of transmission elements. The following figures illustrate the actuation concept. |
||
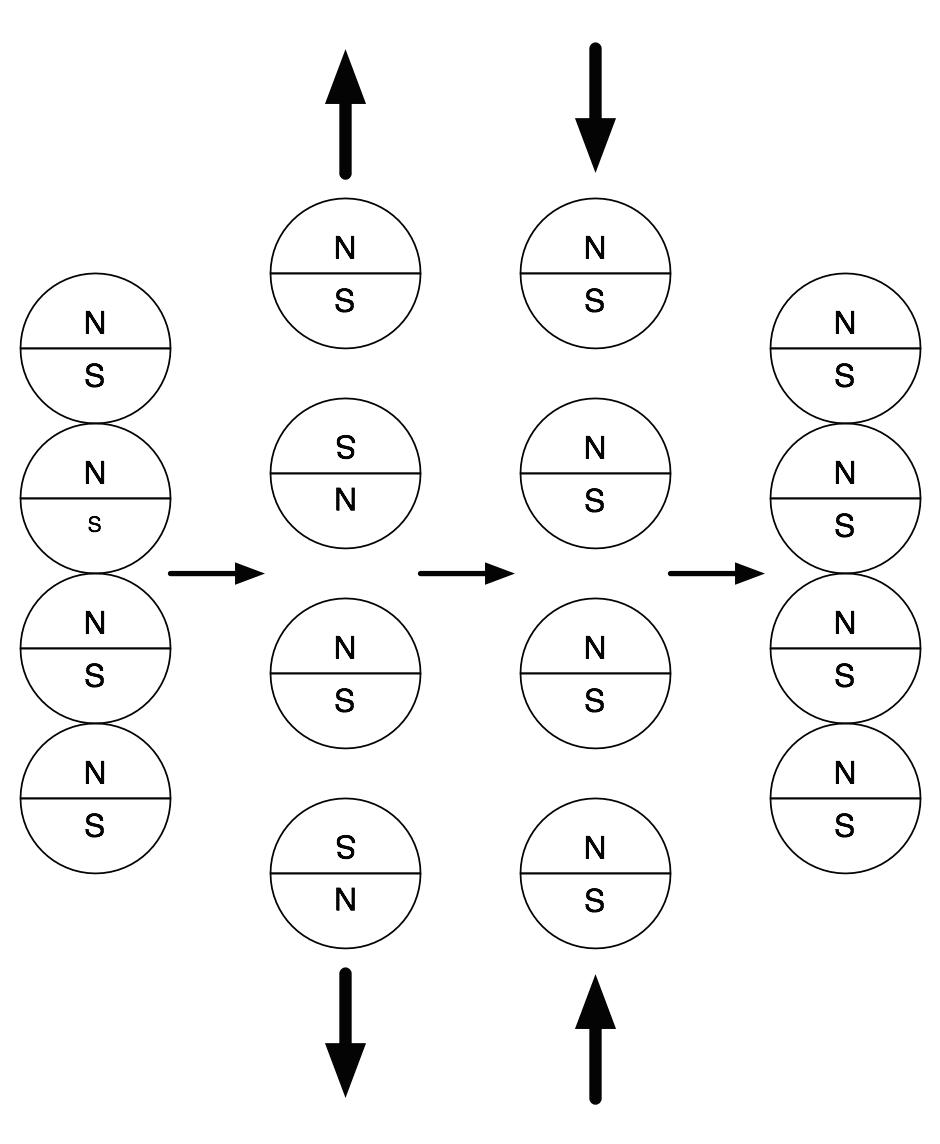
Schematic of how to obtain attraction/repulsion forces by changing the orientation of a set of magnets (N: north, S: south). |
||
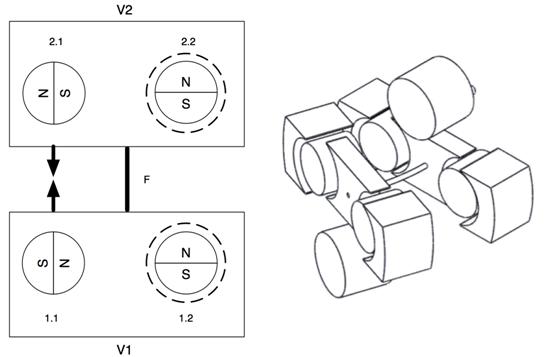
Schematic of how to modulate the magnetic force intensity by changing the orientation of a couple of magnets. |
||
|
||
|
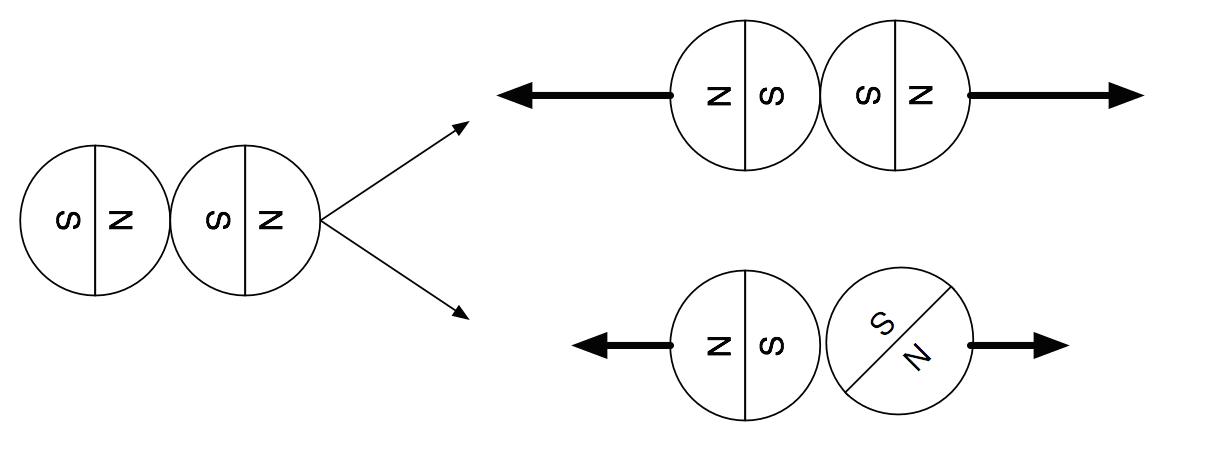
An additional, important point deserves special attention. Being the magnetic field conservative, it is possible to further enhance the energy-efficiency of the considered actuation system. Indeed, there is a portion of energy which is not directly used for actuation, like e.g. the one needed for counter-rotating of a couple of parallel (i.e. not facing) magnets, due to their mutual interaction. It is most suitable, therefore, to add a conservative energy recovery system, i.e. a system having an energy offer [demand] directly supplying for [storing] the energy demand [offer] associated with the considered magnet counter-rotation. A model recovery system may be a spring-like element, as the one sketched in the following figure.
|
||
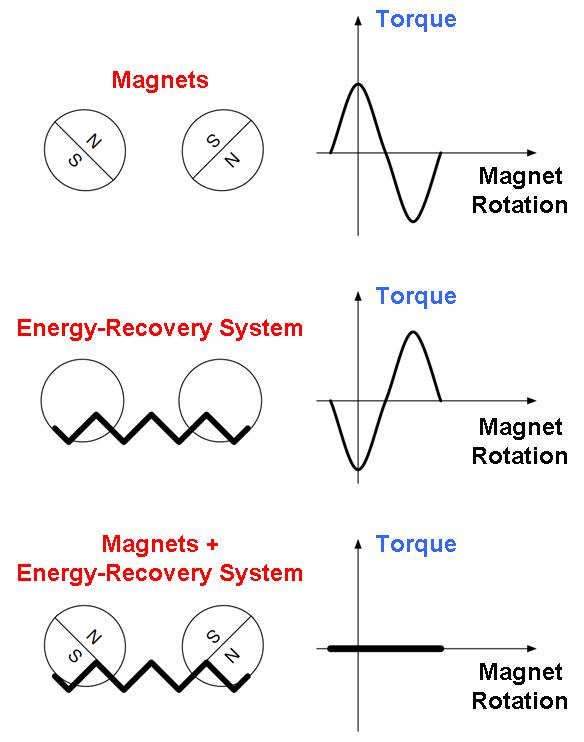
Schematic of the conservative energy recovery system, which further enhances the actuation efficiency. |
||
|
Finally, the magnet rotation can be performed by servomotors, commonly powered by electricity, thus further contributing to the overall "cleanliness" of the system. In summary, the patented actuation system outperforms traditional ones by exhibiting high-back-drivability, considerable output forces and high energy-efficiency thanks to a novel, frictionless actuation concept, also allowing for an energy recovery mechanism suitably fitting the passive dynamics concept discussed in the previous sections. Furthermore, once incorporated the proposed muscle-like actuation into a given system, it is possible to modulate the overall system stiffness by adjusting the relative positioning of the magnets (directly affecting the magnetic force intensity), in analogy with what animal do by varying the basal tone of their musculature. The energy efficiency of the resulting system is expected to be very high (e.g. more than 50% for the artefact developed within the Lampetra project, which could swim for several kilometers by consuming about 35 kJ). |
||
|
A widely exploitable concept: general applications The energy-efficient design concept discussed above, supported and fully enabled by the proposed, novel actuation technology can be effectively exploited in a variety of application fields. In particular, it can play a role in those application fields where sustainability is a major issue. In this spirit, besides the main targeted research areas of the Lampetra Project (i.e. neuroscientific studies related to goal-directed locomotion and new solutions for high-performance artificial locomotion), the proposed actuation and system design concept can be used for: - environmental exploration, especially where system autonomy is a key issue and therefore energy-efficiency straightforwardly comes into play; - user-friendly, ergonomic and safe interfaces in "soft robotics", including new human-machine interfaces, wearable systems, etc… Moreover, new compliant industrial manipulators can be devised, for safer operational modes; - clean and energy-efficient powering technologies supplanting traditional pneumatics and hydraulics. |
||
|
Other enabling technologies: compliant skin and tail As remarked, compliance is a key aspect in the sustainable design concept presented in the previous sections. When dealing with underwater locomotion, it must be also considered as for propulsion/steering appendages and system covering (i.e. skin). A waterproof, resistant and flexible skin has been developed for the Lampetra artefact. In particular, silicone rubber, having good mechanical properties, has been used as main constituent material. Moreover, nylon stocking and a polymeric thin film have been also exploited, so as to produce a specific, composite material. Furthermore, a dedicated equipment and fabrication protocol have been developed and set-up in order to confer a suitable wavy shape on the skin. |
||

Artificial, waterproof, compliant skin. |
||
|
Finally, a compliant tail has been fabricated, its backbone consisting of harmonic steel and having suitable dimensions so as to achieve good flexibility while preserving stiffness as close as possible to the one of the real animal. Other components and materials (flexible elastic tube, polyester adhesive tape, silicone rubber, vinyl foil and nylon tissue) have been used to confer the tail with the final shape as well as for providing suitable mechanical (e.g. damping) characteristics.
|
||

Compliant tail (harmonic steel backbone and auxiliary components/materials covered with silicone). |
||
| << Back To Focus On |
|
© 2009 Lampetra consortium |