HomeRobotic Database - Robotic platform | TERRINet

FUTURA platform for US-guided HIFU treatment
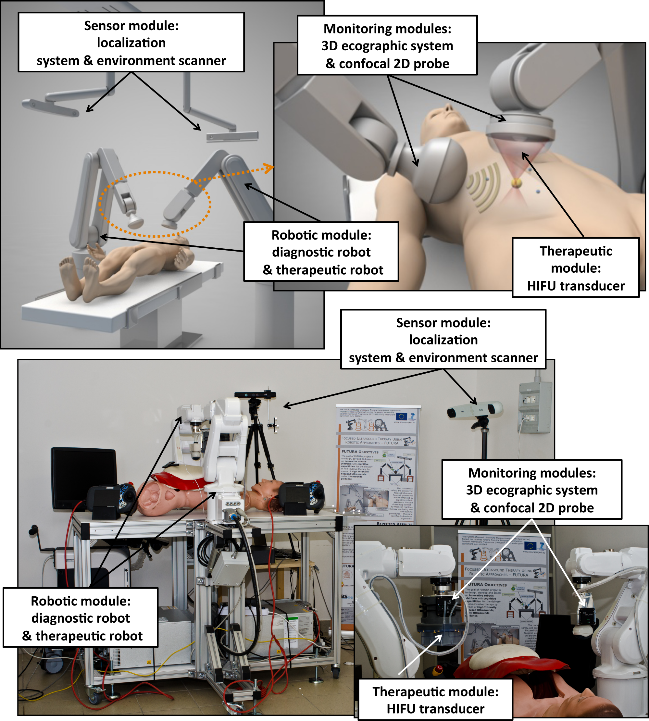
The FUTURA system is a robotic-assisted platform designed for Ultrasound-guided High Intensity Focused Ultrasound (HIFU) treatment. The control of two independent anthropomorphic manipulators provides the FUTURA platform with high flexibility in terms of operating workspace and maneuverability.The platform is composed of: i) a robotic module, ii) a therapeutic module, and iii) a monitoring module. The robotic module is composed by two anthropomorphic industrial manipulators (i.e., ABB IRB 120) equipped with two force/torque sensors (ATI mini 45). The monitoring module is composed by two different US probes: i) a 2D imaging US probe (Analogic Ultrasound PA7-4/12) confocal to the HIFU transducer, and ii) a motorized 3D imaging US probe (Analogic Ultrasound 4DC7-3/40) mounted on the second manipulator, both connected to the Analogic Ultrasound SonixTablet machine. The therapeutic module consists of a custom-made Focused Ultrasound System. This system has three main components: i) a multi-channel high power signal generator (Image Guided Therapy), ii) a 16 channels phased annular array transducer (Imasonic), and iii) a coupling system (small pillow filled with water) which provides a good acoustic path between the transducer and the patient. The remote control on the FUS generator allows to adjusts the shooting parameters (e.g. focal depth) with a frequency of 20 Hz. The different modules of the FUTURA platform are mutually controlled through dedicated software developed in Robot Operating System (ROS) framework. The FUS treatment is managed by the users through a dedicated Human Machine Interface with real-time visualization of the working scenario. The high modularity of the platform allows for the testing of different modalities: specific experiments dedicated to image guidance, force controlled contact with human tissues, obstacle avoidance strategies between manipulators and patients/operators can be also set-up in the framework of the overall structure.
Key features:
- HIFU therapy delivery in a range of distance from 10 to 130 mm from the patient’s skin
- Modularity
- High flexibility in terms of operating workspace and manoeuvrability
- Robotic HIFU treatment under US guidance – no invasive intervention
- Control strategy for organ breathing compensation
- Safety strategy
Possible applications:
- Computer vision techniques
- Machine learning
- Motion compensation strategy
- Robotic HIFU treatment characterization
- US and FUS phantom realization and testing
Technical specifications
| US systems: | motorized 3D imaging US probe – Analogic Ultrasound 4DC7?3/40 |
| HIFU system: | 16 channels custom annular array HIFU transducer |
| Control strategy: | Machine learning and computer vision techniques |
| Robotic components: | 2 ABB robotic arms, i.e. 6 DoFs each |
| Precision: | Final shooting accuracy < 1mm |
Access information
| Corresponding infrastructure | School of Advanced Studies Sant'Anna The BioRobotics Institute |
| Location | Viale Rinaldo Piaggio, 34 |
| Unit of access | Working day |
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No 730994



Sitemap
Training
Sitemap
Copyright by TERRINet. All rights reserved. – Designed by RGR